Search
Now showing items 1-10 of 15
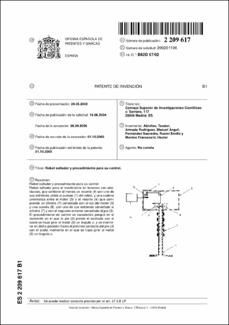
Robot Saltador y Procedimiento para su Control
(2005-10-01)
Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte (4) con uno de sus extremos unido al cuerpo (1) del robot, y una cadena cinemática entre el motor (5) y el resorte (4) que ...
ROBOCLIMBER: Control System Architecture
(07/01/2004)
The paper shows the complete system architecture of a walking and climbing robot developed to make slope consolidation, where heavy duty equipment is employed for drilling up to 20m holes. ROBOCLIMBER a quadruped robot ...

State of the Art Review on Mobile Robots and Manipulators for Humanitarian Demining
(2016-07-04)
Robotics solutions properly sized with suitable modularized structure and well adapted to local conditions of dangerous unstructured areas can greatly improve the safety of personnel as well as the work efficiency, ...

Robots Móviles para Tareas de Desminado Humanitario
(2013-07-05)
La eliminación de minas antipersona es un problema de dimensión internacional que requiere del empleo de nuevas tecnologías tales como el desarrollo de sensores avanzados y el empleo eficiente de robots móviles. ...

Reliable, Built-in, High-Accuracy Force Sensing for Legged Robots
(2006-06-28)
An approach for achieving reliable, built-in, high-accuracy force sensing for legged robots is presented, based on direct exploitation of the properties of a robot’s mechanical structure. The proposed methodology relies ...
Adding extra sensitivity to the SMART non‐linear actuator using sensor fusion
(Industrial Robot: The International Journal Of Robotics Research And ApplicationIndustrial Robot: The International Journal Of Robotics Research And Application, 03/01/2004)
The prospect of using humanoid robots in practical applications attracts an important research effort and the latest steps forward in robot technology show many remarkable achievements where design aspects, control systems ...

On the Design and Development of Climbing and Walking Robots for the Maritime Industries
(2005-06-27)
Modern robotic systems are increasingly powerful in terms of sensor fusion and mobility. Present technological progress allows advanced robots to cope progressively much better also with complex environments such as those ...

A Perception System for Accurate Automatic Control of an Articulated Bus
(2010-07-02)
This paper describes the perception system for an automatic articulated bus where an accurate tracking trajectory is desired. Among the most promising transport infrastructures of the autonomous or semi-autonomous ...

Evaluation of a Sensory Tracking System for Hand-held Detectors in Outdoor Conditions
(2013-07-05)
This paper presents the experimental results obtained throughout the outdoor testing of a sensory tracking system specifically designed as part of a training tool for improving the utilisation of hand-held detectors. The ...

Vertical Movement of Resonance Hopping Robot with Electric Drive and Simple Control System
(2003-06-01)
In the paper vertical movements of resonance hopping robot with one leg and electric drive are considered. Special construction of hopping robot with compensation of losses during flight of the robot allows to employ a ...