Search
Now showing items 1-10 of 16
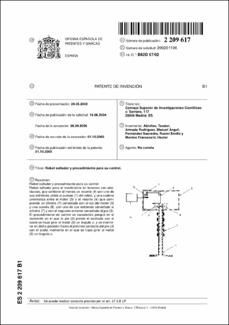
Robot Saltador y Procedimiento para su Control
(2005-10-01)
Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte (4) con uno de sus extremos unido al cuerpo (1) del robot, y una cadena cinemática entre el motor (5) y el resorte (4) que ...
ROBOCLIMBER: Control System Architecture
(07/01/2004)
The paper shows the complete system architecture of a walking and climbing robot developed to make slope consolidation, where heavy duty equipment is employed for drilling up to 20m holes. ROBOCLIMBER a quadruped robot ...

Reliable, Built-in, High-Accuracy Force Sensing for Legged Robots
(2006-06-28)
An approach for achieving reliable, built-in, high-accuracy force sensing for legged robots is presented, based on direct exploitation of the properties of a robot’s mechanical structure. The proposed methodology relies ...
Adding extra sensitivity to the SMART non‐linear actuator using sensor fusion
(Industrial Robot: The International Journal Of Robotics Research And ApplicationIndustrial Robot: The International Journal Of Robotics Research And Application, 03/01/2004)
The prospect of using humanoid robots in practical applications attracts an important research effort and the latest steps forward in robot technology show many remarkable achievements where design aspects, control systems ...

On the Design and Development of Climbing and Walking Robots for the Maritime Industries
(2005-06-27)
Modern robotic systems are increasingly powerful in terms of sensor fusion and mobility. Present technological progress allows advanced robots to cope progressively much better also with complex environments such as those ...

Estimation Aveugle Itérative par Filtrage H∞ des Décalages Doppler d’un Système OFDMA Entrelacé en Liaison Montante
(2009-07-01)
Il s'agit d'estimer et de compenser de multiples décalages Doppler dans un contexte multi-(porteuses, utilisateurs) OFDMA en liaison montante. Pour cela, nous proposons une architecture de réception itérative capable ...

Modèles 2-D MA pour les champs non déterministes et la décomposition de textures de type Wold
(2007-06-29)
Nous proposons une nouvelle méthode pour l'estimation de paramètres d'un modèle 2-D MA infini tronqué associé aux champs stationnaires non déterministes. Cette méthode est développée dans le cadre d'approches d'analyse et ...

Outer Factor 2-D MA Models for Purely Random Fields and Fields and Wold-Tipe Texture Decompositions
(2007-06-29)
In this paper, we propose a new method to compute the parameters of finite approximations of 2-D MA infinite models associated with purely indeterministic stationary fields, by using spectral factorizations. This method ...

Compressive Sensing for Inverse Scattering
(2008-06-30)
Compressive sensing is a new field in signal processing and applied mathematics. It allows one to simultaneously sample and compress signals which are known to have a sparse representation in a known basis or dictionary ...

A New Methodology for Massive Alarm Management System in Electrical Power Administration
(2009-07-01)
The paper presents a methodology that integrates several available techniques to manage the massive amount of alarm signals in electrical power dispatch control centers, as well as the contribution of each entity involved ...