Search
Now showing items 1-6 of 6
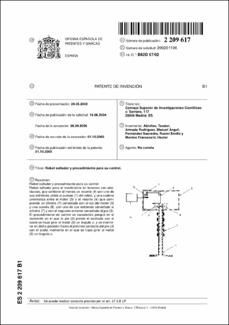
Robot Saltador y Procedimiento para su Control
(2005-10-01)
Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte (4) con uno de sus extremos unido al cuerpo (1) del robot, y una cadena cinemática entre el motor (5) y el resorte (4) que ...

Reliable, Built-in, High-Accuracy Force Sensing for Legged Robots
(2006-06-28)
An approach for achieving reliable, built-in, high-accuracy force sensing for legged robots is presented, based on direct exploitation of the properties of a robot’s mechanical structure. The proposed methodology relies ...

On the Design and Development of Climbing and Walking Robots for the Maritime Industries
(2005-06-27)
Modern robotic systems are increasingly powerful in terms of sensor fusion and mobility. Present technological progress allows advanced robots to cope progressively much better also with complex environments such as those ...

Vertical Movement of Resonance Hopping Robot with Electric Drive and Simple Control System
(2003-06-01)
In the paper vertical movements of resonance hopping robot with one leg and electric drive are considered. Special construction of hopping robot with compensation of losses during flight of the robot allows to employ a ...

Robust Cascade Controller for Nonlinearly Actuated Biped Robots: Experimental Evaluation
(2004-06-26)
In this paper we consider the postural stability problem for nonlinearly actuated quasi-static biped robots, both with respect to the joint angular positions and also with reference to the gripping effect between the ...

Methodology for Zero-moment Point Experimental Modeling in the Frequency Domain
(2006-06-28)
Frequency domain methodology is applied to obtain a nominal model for the Zero-Moment Point (ZMP) stability index of a biped robot in an attempt to establish a relationship between the robot trunk trajectories and the ...