El sistema se apagará debido a tareas habituales de mantenimiento. Por favor, guarde su trabajo y desconéctese.
Robot Saltador y Procedimiento para su Control
| dc.contributor.author | Akinfiev, Teodor | |
| dc.contributor.author | Armada, Manuel | |
| dc.contributor.author | Fernández, Roemi | |
| dc.contributor.author | Montes Franceschi, Héctor | |
| dc.date.accessioned | 2017-08-01T21:10:15Z | |
| dc.date.accessioned | 2017-08-01T21:10:15Z | |
| dc.date.available | 2017-08-01T21:10:15Z | |
| dc.date.available | 2017-08-01T21:10:15Z | |
| dc.date.issued | 2005-10-01 | |
| dc.date.issued | 2005-10-01 | |
| dc.identifier.uri | http://ridda2.utp.ac.pa/handle/123456789/2417 | |
| dc.identifier.uri | http://ridda2.utp.ac.pa/handle/123456789/2417 | |
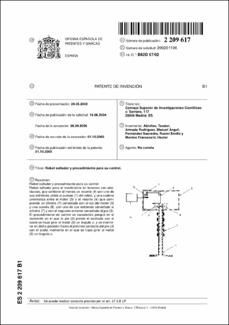
| dc.description | Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte (4) con uno de sus extremos unido al cuerpo (1) del robot, y una cadena cinemática entre el motor (5) y el resorte (4) que comprende un cilindro (7) conectado con el eje del motor (5) y una cuerda (8), con uno de sus extremos conectado al cilindro (7) y con el segundo extremo conectado al pie (3). El procedimiento de control se caracteriza porque en el momento en el que el pie (3) pierde el contacto con el suelo se hace girar al motor (5) un ángulo α, y se mantiene en dicha posición hasta el próximo contacto del pie (3) con el suelo, momento en el que se hace girar al motor (5) un ángulo -α. | en_US |
| dc.description.abstract | Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte (4) con uno de sus extremos unido al cuerpo (1) del robot, y una cadena cinemática entre el motor (5) y el resorte (4) que comprende un cilindro (7) conectado con el eje del motor (5) y una cuerda (8), con uno de sus extremos conectado al cilindro (7) y con el segundo extremo conectado al pie (3). El procedimiento de control se caracteriza porque en el momento en el que el pie (3) pierde el contacto con el suelo se hace girar al motor (5) un ángulo α, y se mantiene en dicha posición hasta el próximo contacto del pie (3) con el suelo, momento en el que se hace girar al motor (5) un ángulo -α. | en_US |
| dc.language | spa | |
| dc.language.iso | spa | en_US |
| dc.rights | https://creativecommons.org/licenses/by-nc-sa/4.0/ | |
| dc.rights | info:eu-repo/semantics/openAccess | |
| dc.subject | robot saltador | en_US |
| dc.subject | cadena cinemática | en_US |
| dc.subject | sistema de control | en_US |
| dc.subject | contacto con el pie | en_US |
| dc.subject | fase de vuelo | en_US |
| dc.subject | fase de aterrizaje | en_US |
| dc.subject | robot saltador | |
| dc.subject | cadena cinemática | |
| dc.subject | sistema de control | |
| dc.subject | contacto con el pie | |
| dc.subject | fase de vuelo | |
| dc.subject | fase de aterrizaje | |
| dc.title | Robot Saltador y Procedimiento para su Control | en_US |
| dc.type | info:eu-repo/semantics/other | |
| dc.type | info:eu-repo/semantics/publishedVersion |